HSVI
The algorithmic scheme of Heuristic Search Value Iteration (opens new window) (HSVI) was firstly introduced by Trey Smith and Reid Simmons.
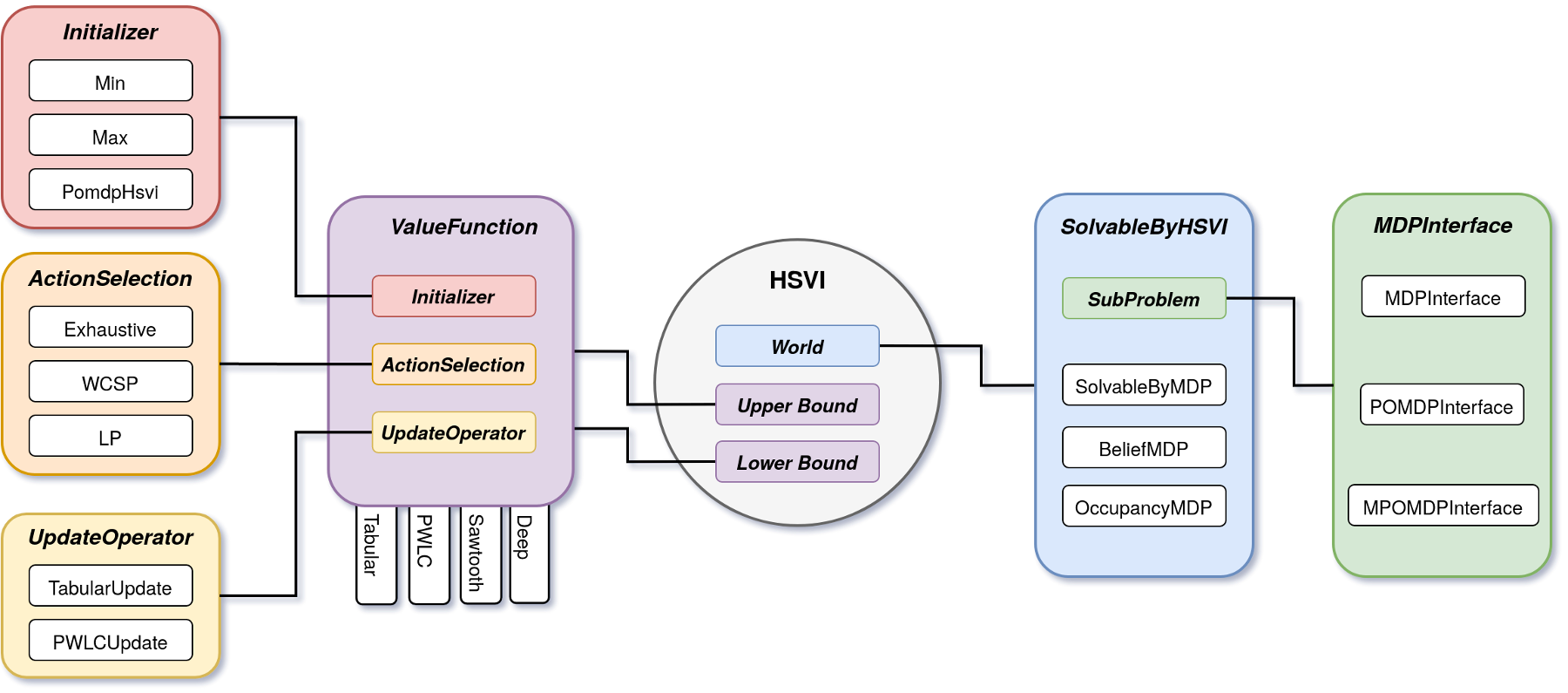
Composantes
× ![]()
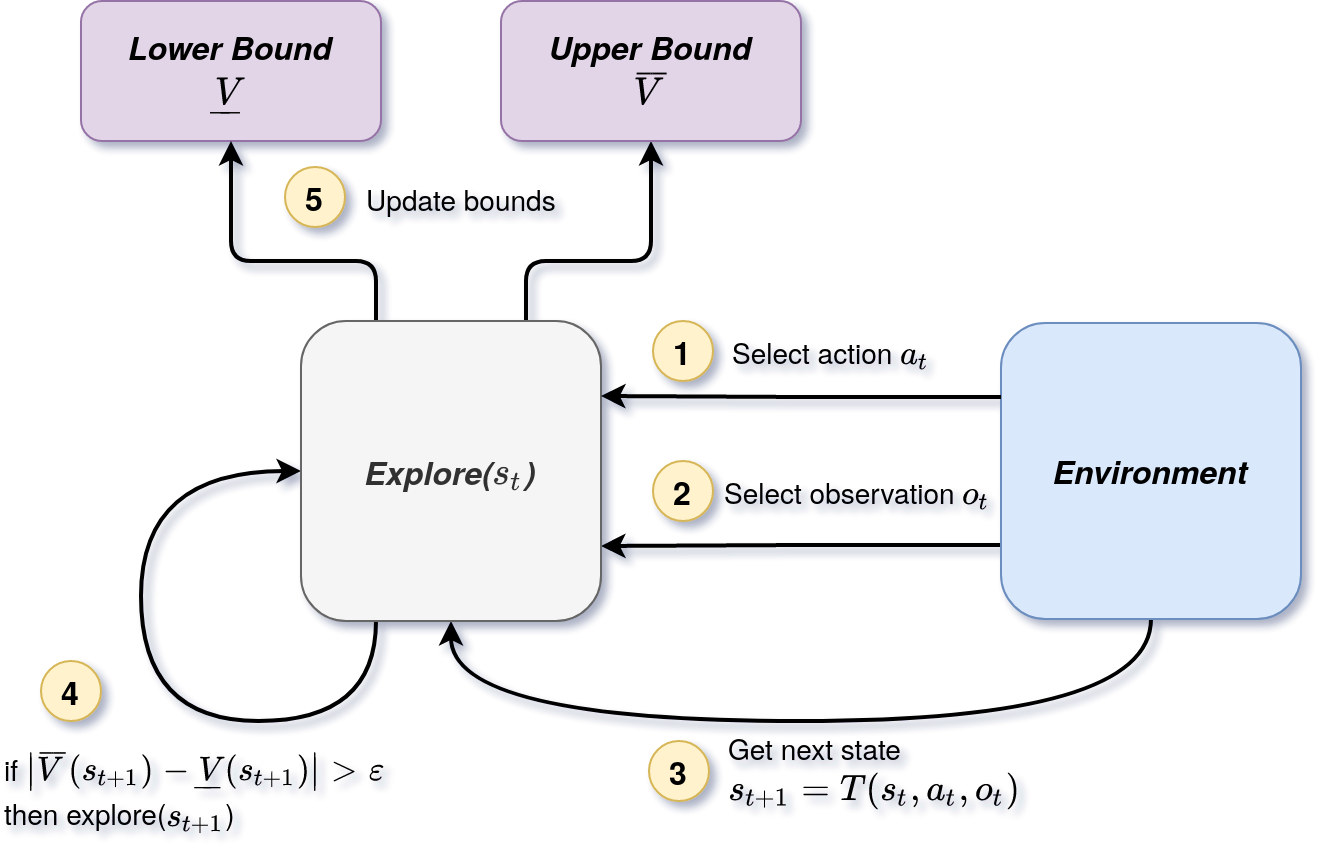
Schéma algorithmique
Le schéma algorithmique général d'HSVI est représenté par le schéma ci-dessous. Pour en définir une instance, celui-ci nécessite de définir les notions d'état , d'action , de borne inférieur et borne supérieur .
× ![]()
Exemple : une instance d'HSVI est l'algorithme oHSVI. Cette instance permet de résoudre un Dec-POMDP formulé comme un occupancy-state MDP. Le type d'état dans ce cas est un état d'occupation, noté . Le type d'action est un ensemble de règles de décision individuelles, noté . La borne inférieure est représentée par une ensemble d'hyperplan et la borne supérieure par un ensemble de point.